analizando

La Red Telefónica Conmutada: (RTC; también llamada Red Telefónica Básica o RTB) es una red de comunicación diseñada primordialmente para la transmisión de voz, aunque pueda también transportar datos, por ejemplo en el caso del fax o de la conexión a Internet a través de un módem acústico.
rdsi:Principios de la RDSI [editar]
- Soporte de aplicaciones, tanto de voz como de datos, utilizando un conjunto de aplicaciones estándar.
- Soporte para aplicaciones conmutadas y no conmutadas. RDSI admite tanto conmutación de circuitos como conmutación de paquetes. Además, RDSI proporciona servicios no conmutados con líneas dedicadas a ello.
- Dependencia de conexiones de 64 kbps. RDSI proporciona conexiones de conmutación de circuitos y de conmutación de paquetes a 64 kbps. Este es el bloque de construcción fundamental de la RDSI.
- Inteligencia en la red. Se espera que la RDSI pueda proporcionar servicios sofisticados por encima de la sencilla situación de una llamada de circuito conmutado.
- Arquitectura de protocolo en capas. Los protocolos para acceso a la RDSI presentan una arquitectura de capas que se puede hacer corresponder con la del modelo OSI.
- Variedad de configuraciones. Es posible más de una configuración física para implementar RDSI. Esto permite diferencias en políticas nacionales, en el estado de la tecnología, y en las necesidades y equipos existentes de la base de clientes,
Se puede decir entonces que es una red que procede por evolución de la red telefónica existente, que al ofrecer conexiones digitales de extremo a extremo permite la integración de multitud de servicios en un único acceso, independientemente de la naturaleza de la información a transmitir y del equipo terminal que la genere.
En el estudio de la RDSI se han definido unos llamados puntos de referencia que sirven para delimitar cada elemento de la red. Estos son llamados R, S, T, U y V, siendo el U el correspondiente al par de hilos de cobre del bucle telefónico entre la central y el domicilio del usuario, es decir, entre la central y la terminación de red TR1.
El concepto de RDSI se introduce mejor considerándolo desde distintos puntos de vista:
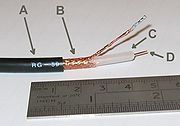
ADSL: son las siglas de Asymmetric Digital Subscriber Line ("Línea de Abonado Digital Asimétrica"). Consiste en una línea digital de alta velocidad, apoyada en el par asimétrico de cobre que lleva la línea telefónica convencional o línea de abonado. Siempre y cuando el alcance no supere los 5,5 km.
Es una tecnología de acceso a Internet de banda ancha, lo que implica capacidad para transmitir más datos, lo que, a su vez, se traduce en mayor velocidad. Esto se consigue mediante la utilización de una banda de frecuencias más alta que la utilizada en las conversaciones telefónicas convencionales (300-3.400 Hz) por lo que, para disponer de ADSL, es necesaria la instalación de un filtro (llamado splitter o discriminador) que se encarga de separar la señal telefónica convencional de la que usaremos para conectarnos con ADSL.
El pago por visión —en inglés pay per view (PPV), o también conocido como pago por evento (PPE)— es una modalidad de televisión de pago, en la que el abonado paga por los eventos individuales que desea ver. Éstos pueden ser eventos deportivos, películas recién estrenadas, conciertos musicales importantes, etc. Habitualmente el sistema se comercializa como complemento a un paquete de canales de televisión que el abonado recibe continuamente de la forma tradicional, debiendo pagar, además de los eventos comprados, una cuota fija y habitualmente un alquiler por el equipo necesario.
A diferencia de los sistemas de vídeo a la carta (video on demand), la señal se transmite de forma simultánea para todos los compradores. El canal empleado puede ser tanto digital como analógico, y el usuario no recibe señal, o la recibe distorsionada en tanto que no efectúa la "compra". La compra se puede realizar de forma automática, con el mando a distancia a través del propio equipo decodificador conectado a una línea telefónica o por el propio cable si se trata de televisión por cable; también de forma manual, a través de un distribuidor o realizando una llamada telefónica.
La necesidad del decodificador supone un inconveniente cuando se desea ver distintos contenidos en varias televisiones del abonado.
El sistema de pago por visión tiene su origen en los Estados Unidos en la década de los años 1970.
por satelite:
Digital Video Broadcasting by Satellite (DVB-S) es un sistema que permite incrementar la capacidad de transmisión de datos y televisión digital a través de un satélite UH11 usando el formato. La estructura permite mezclar en una misma trama un gran número de servicios de video, audio y datos.
Para transmisiones vía satélite se adopta la codificación QPSK (Quadrature Phase Shift Keying), con un flujo binario variable de 18,4 a 48,4 Mbits/s. El formato DVB-S es ampliamente usado en países europeos como Alemania y Finlandia.![]()
posted by alvaro at 10:24 a. m.
0 comments
![]()
























{kind=link}
{kind=link}